Robotically Researching
Bat Echolocation
Interned with Dr. Vanderelst at the University of Cincinnati. Solved key engineering issues throughout the laboratory's wide range of projects. Quickly became valued for my skill with CAD and prototyping technologies and my ability to ingenously solve engineering obstacles.
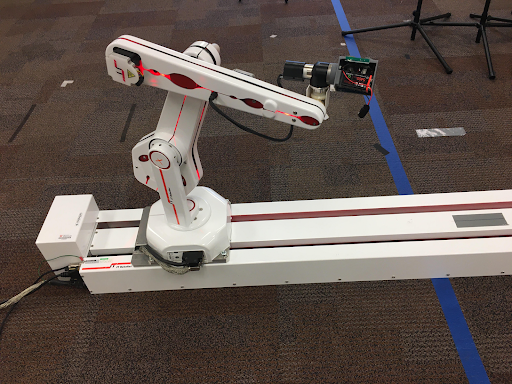

The first research project I worked on was studying the possibility of "acoustic flow" in bat echolocation by running an ultrasonic-sensor-mounted robotic arm through a corridor with vairably distanced vertical rods on either side.
First, I learned NumPy--a scientific computing package for Python--and helped program the ultrasonic-sensor-mounted robotic arm, collected acoustic data with the robot, and subsequently analyzed and interpreted the acoustic data.
Meanwhile, I began brainstorming and prototyping different ideas for the construction of the experimental setup. I ended up designing and constructing a slotted base, with 3D-printed mounts, for the vertical wooden rods. I also developed an efficient way of wrapping some of the wooden rods with felt (in order to test differeces in reflectivity).
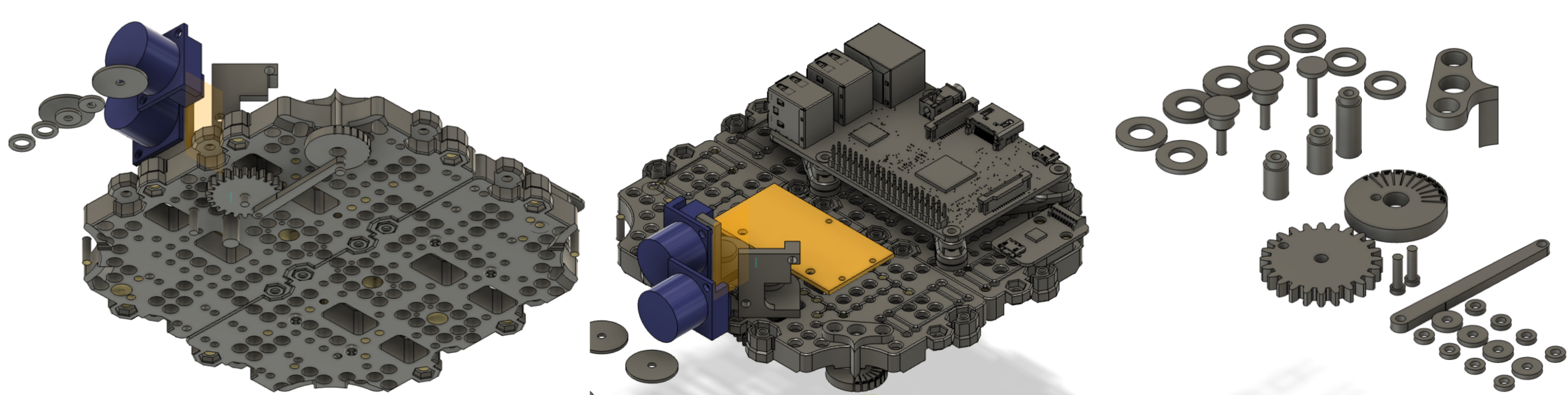
The next research project I worked on was studying and modeling how bats use echolocation to navigate and locate prey in complex forest environments.
First, I built a differential-drive robot with a rasberry pi microcontroller, batteries, DC motors, etc. Next, I designed and 3D-printed a custom ultrasonic-sensor mount for the robot that used a lever, gears, and a ratchet to precisely tune the angle between the senors using a convenient marked dial.
Next, I faced the challenge of making an artificial forest environment for the robot. Buying the immense quantity of artificial plants would be far too expensive, so, I designed and built an ingenous device that facilitates the rapid fabrication of artificial plants from string, wires, and fake leaves. The machine uses constant tension from an elastic band and a system of hooks, slots, levers, and rotating bars to twist leaves into a main "stem" structure made of string.

This is a 3D-printed replica of a bat ear intended to be fitted on the ultrasonic sensors on the robots. It was made using a 3D-scan of a real-life bat ear. We collected and analyzed sound data from the robot using this ear in order to build a more accurate model.