An overview of
my portfolio
A brief introduction to my portfolio: What I make. How I make. Why I make.
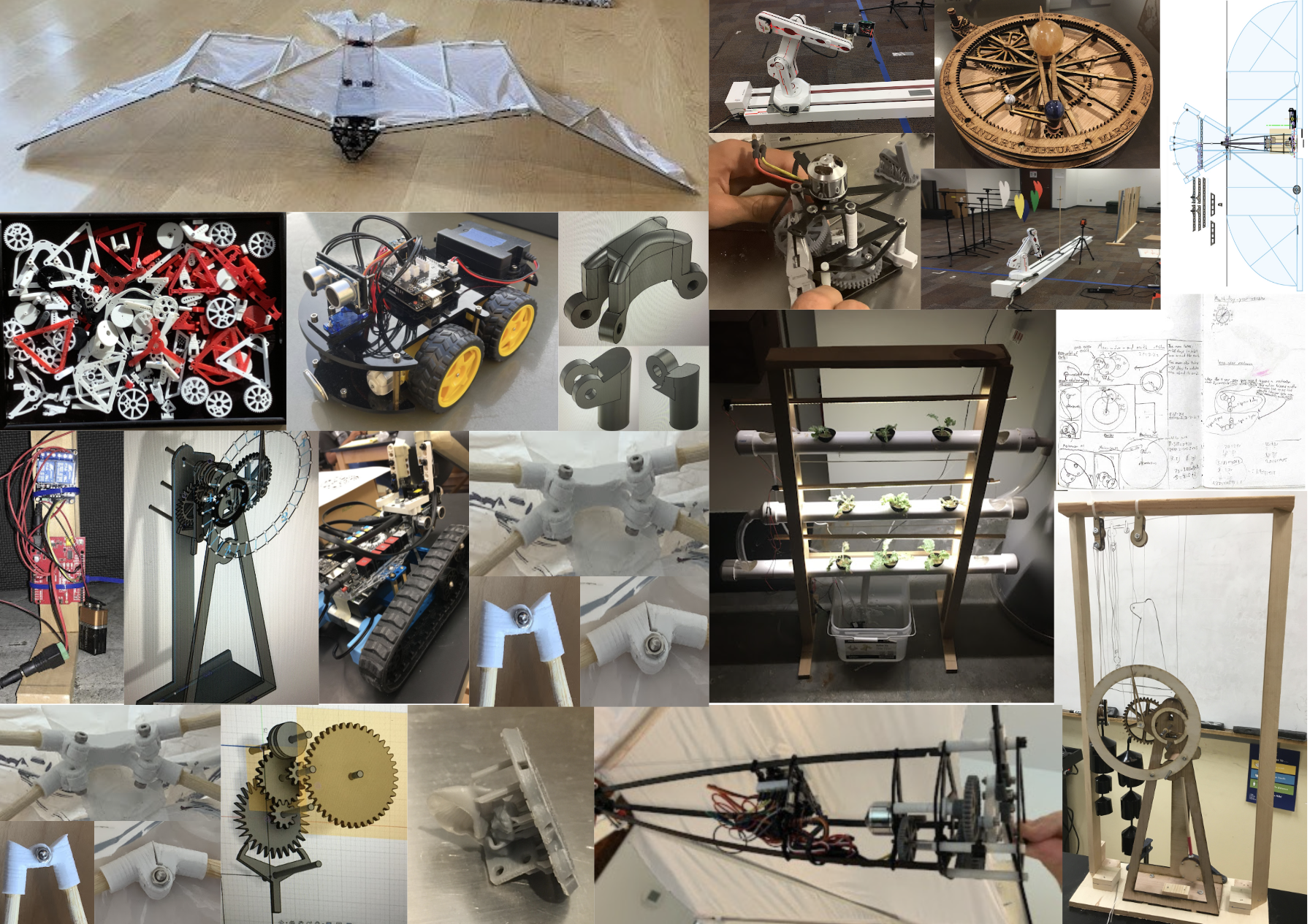
A brief introduction to my portfolio: What I make. How I make. Why I make.

Designed and prototyped a remote-control Ornithopter--a drone that uses bird-like articulated flapping wings to fly. CAD designed with Fusion-360 from scratch, built out of 3D-printed polymers, laser-cutted fiberglass, carbon-fiber rods, and Nylon ripstop fabric. Custom wired and programmed remote-controller and drone receiver control systems--used arduino microcontrollers, RF transceivers, servo steering and DC motor controller. Programmed with C++
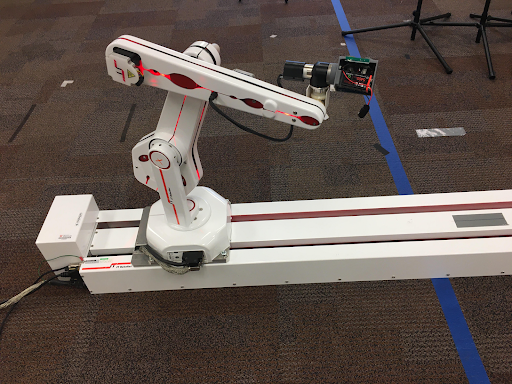
Used ultrasonic-sensor-mounted robot arm and navigating robotic vehicle to study neural mechanisms of bat acoustic navigation. Designed ultrasonic sensor mounts, built robot vehicle, created & problem-solved "acoustic flow" experimental setup, invented ingenous artificial-plant fabrication device. Used Fusion-360, NumPy, resin 3D-printers. (As intern of Dr. Vanderelst at University of Cincinnati).
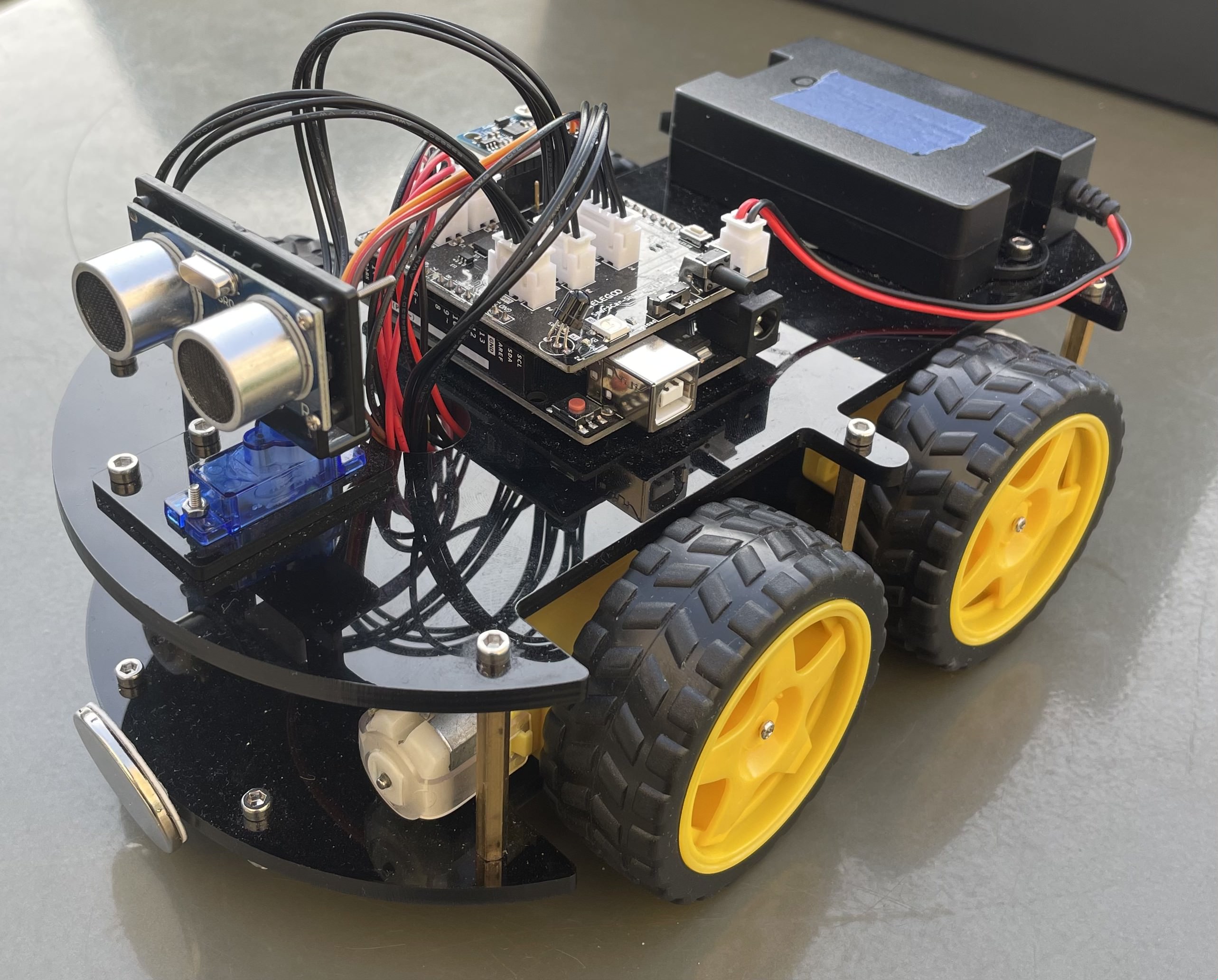
Developed two different differential-drive robots that use diverse sensors to navigate through courses and diverse environments. The first robot involved line-following, wall avoidance, and short-distance small obstacle avoidance through specifically bio-inspired sensing systems and sensory control algorithms. The second robot focused on navigating a specific course and completing a tasl, using more specialized, precise, and robust PID control systems. Infrared line-following control system inspired by termite odor-trail following.

A custom designed small-scale hydroponic garden with an innovative vertical running-water system. Fully automated closed-loop control pump and lights system, uses humidity, lighting, and plant species imput. Used Arduino microcontroller, C++ code, rockwool, pipes, tubing, wood frame.
Designed and prototyped an innovative automatically-folding backpacking tent concept. The geometric design of the folding pattern is inspired by certain self-folding plants. Elegant, simple, effective, and sturdy design. I fully modeled the movement of the folding mechanism and designed automatically locking joints using Fusion-360. I then built a scaled-down prototype using 3D-printed joints.
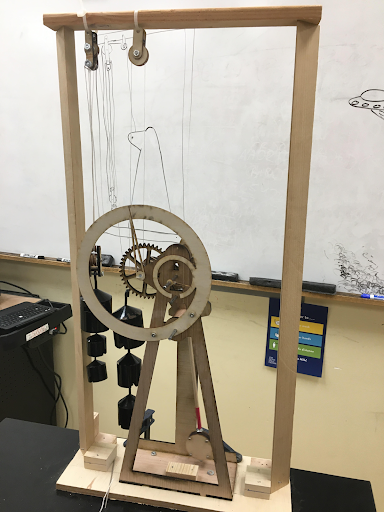
Designed and built custom weight-driven pendulum chronograph. Created from scratch using Fusion-360, hand-designs, gears generated using custom python script for Fusion-360. Laser-cutted out of plywood. Innovative and original design.

Custom designed and built a mechanical model of the orbit of the moon and earth around the sun. Designed using Fusion-360, gears generated with custom Python script for Fusion-360. Laser-cut out of plywood.
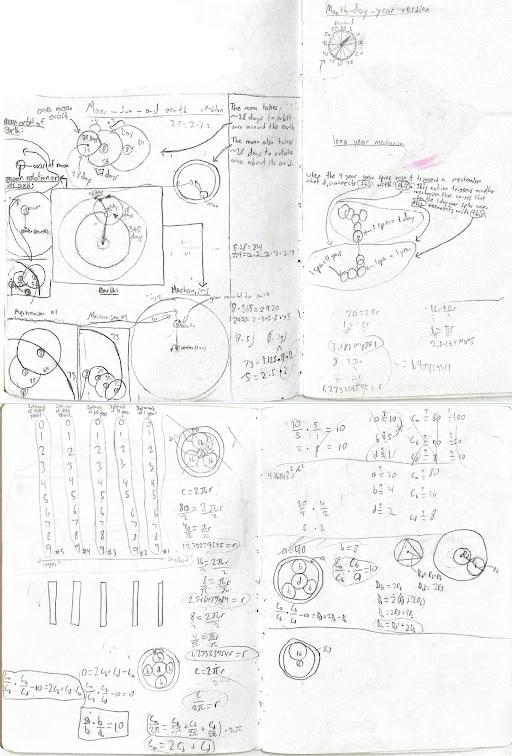
Brainstorming, researching, and exploring creative and innovative mechanical ideas. Concepts for mechanical calculators and computers, mechanical feedback control systems, mechanical models of orbits of planets, moons, and the solar system.